◆イノベーターコース(3年目)は、様々な資料を参考にしながら研究を行い、楽しくなるような機能を追加したり、デザインに工夫を凝らしたりして、オリジナル性をより深めます。また、パソコン上でアニメーションを作り、組み立てたロボットを多様に演出します。
| I1 | 釣りゲームの研究(ロボット編) | 4月 |
| I2 | 釣りゲームの研究2(ロボット&プレイ画面編) | 5月 |
| I3 | 生物模倣 ホタルの光の研究 | 6月 |
| I4 | スマートホームの研究 | 7月 |
| I5 | 歩行と進化の研究 恐竜編 | 8月 |
| I6 | 歩行と進化の研究 直立二足歩行編 | 9月 |
| I7 | 倒立振子ロボットの研究 | 10月 |
| I8 | スキャナの研究 | 11月 |
| I9 | DJブースの研究 作曲&アレンジ演奏 | 12月 |
| I10 | 巨大クレーンの研究 | 1月 |
| I11 | スイッチの研究~早おしクイズ~ | 2月 |
| I12 | 課題解決 世界遺産ツアー | 3月 |
※「DCモーター」の『モーター校正』
※新型コロナウィルス対応のため、2020年4月~7月は日程を変更して実施しました。
ここで掲載している動画は、テキストのプログラムに手を加えていることがあります。
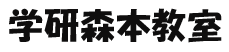
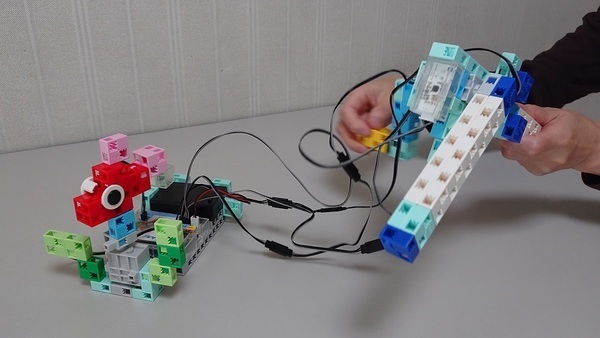 釣り(つり)ゲームの製作では、初めて『ジャイロセンサー』を使いました。竿(さお)を振ってゲームを開始し、リールを巻くとサオがしなり、魚が釣れるゲームです(
釣り(つり)ゲームの製作では、初めて『ジャイロセンサー』を使いました。竿(さお)を振ってゲームを開始し、リールを巻くとサオがしなり、魚が釣れるゲームです(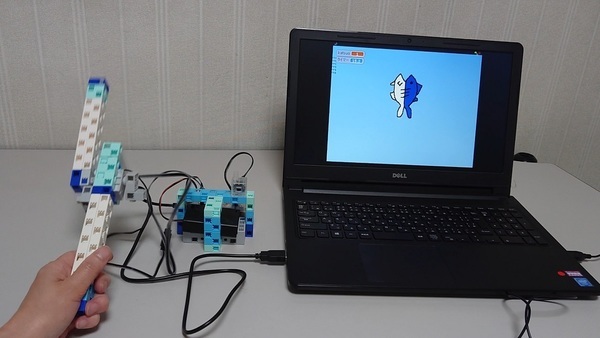 「キャラクター」バージョンのプログラムを初めて体験し、『カツオの一本釣り』を製作しました。
「キャラクター」バージョンのプログラムを初めて体験し、『カツオの一本釣り』を製作しました。 舵(かじ)を組み立て、船と鳥山(とりやま)を追加しました。
舵(かじ)を組み立て、船と鳥山(とりやま)を追加しました。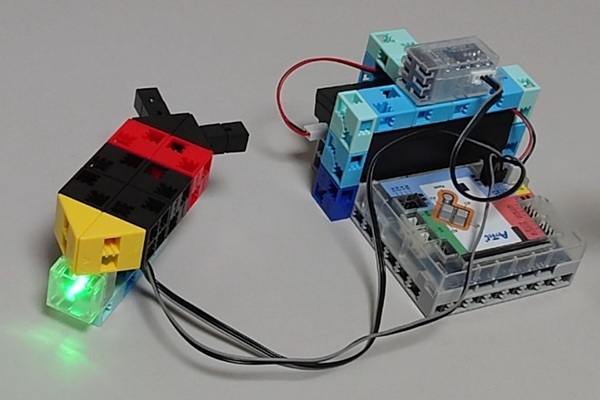 (1)ホタルが「ふわっ」と光る感じを、プログラミングで再現しました。
(1)ホタルが「ふわっ」と光る感じを、プログラミングで再現しました。 (2)音に反応し、パソコン画面上のホタルが飛び立ちます。上の写真で、スタディーノ本体の上に取り付けられているのが「音センサー」です。音の大きさを感知します。
(2)音に反応し、パソコン画面上のホタルが飛び立ちます。上の写真で、スタディーノ本体の上に取り付けられているのが「音センサー」です。音の大きさを感知します。 (3)前にいるホタル(写真の右)が光ったら、後ろのホタルも光ります。
(3)前にいるホタル(写真の右)が光ったら、後ろのホタルも光ります。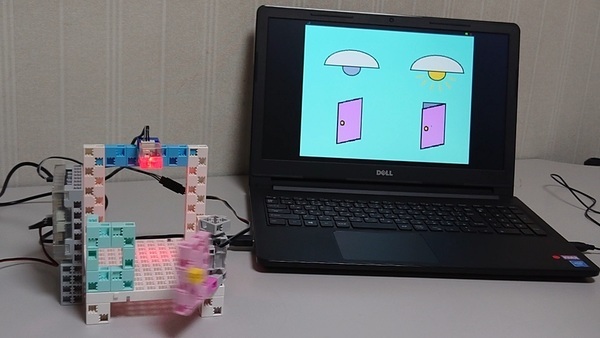 家電などをインターネットにつなぐことで、便利な暮らしができる家が「スマートホーム」です。
家電などをインターネットにつなぐことで、便利な暮らしができる家が「スマートホーム」です。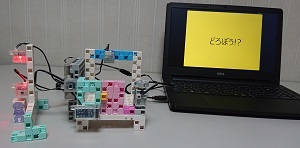 (2)防犯システムを考えました。
(2)防犯システムを考えました。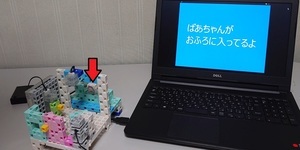 (4)「見守りシステムの開発」で、一人暮らしのお年寄り(写真の赤い矢印)の生活を見守るしくみを考えました。
(4)「見守りシステムの開発」で、一人暮らしのお年寄り(写真の赤い矢印)の生活を見守るしくみを考えました。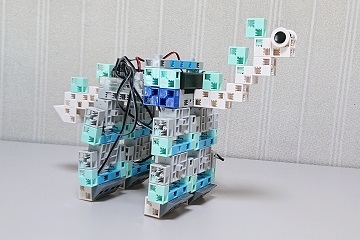 (1) 四足歩行(よんそくほこう)の恐竜(ステゴサウルス型ロボット)を製作しました。
(1) 四足歩行(よんそくほこう)の恐竜(ステゴサウルス型ロボット)を製作しました。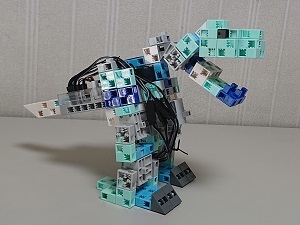 (2) 二足歩行(にそくほこう)の恐竜(ティラノサウルス型ロボット)を製作しました。
(2) 二足歩行(にそくほこう)の恐竜(ティラノサウルス型ロボット)を製作しました。 (1) 直立して二足歩行するロボットを製作しました。
(1) 直立して二足歩行するロボットを製作しました。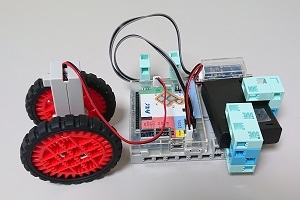 車輪型の『ミニ倒立振子(とうりつしんし)』を作って、一輪車のようにバランスをとりました。
車輪型の『ミニ倒立振子(とうりつしんし)』を作って、一輪車のようにバランスをとりました。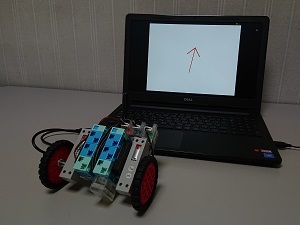
 後半では、倒立振子ロボットがまっすぐに立つ状態を保つようにプログラミングしました。
後半では、倒立振子ロボットがまっすぐに立つ状態を保つようにプログラミングしました。 I7の『倒立振子ロボット』で、DCモーター2個が車輪を回転させるために使われています。
I7の『倒立振子ロボット』で、DCモーター2個が車輪を回転させるために使われています。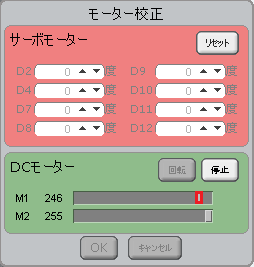 (1)回転の速さの違いが分かるように、左右の車輪に印(しるし)を付けます(ここでは赤いシールを貼りました)(写真上)。
(1)回転の速さの違いが分かるように、左右の車輪に印(しるし)を付けます(ここでは赤いシールを貼りました)(写真上)。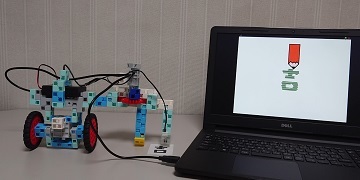 [平面]
[平面]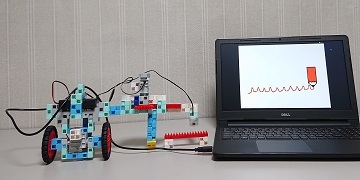 [立体]
[立体]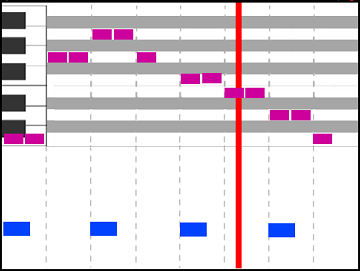 前半は、キャラクターモードです。
前半は、キャラクターモードです。 後半では「DJコントローラ」をブロックで組み立て、前半に作った「キラキラ星」の曲をアレンジしました。
後半では「DJコントローラ」をブロックで組み立て、前半に作った「キラキラ星」の曲をアレンジしました。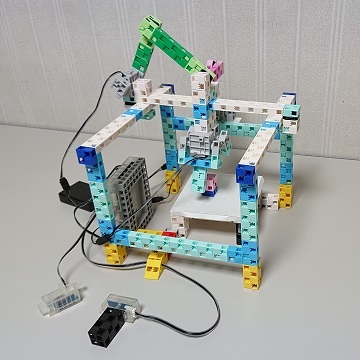 工事現場で見かける「クレーン」です。
工事現場で見かける「クレーン」です。 後半は、タッチセンサーのみで操作する「クレーンゲーム」です。
後半は、タッチセンサーのみで操作する「クレーンゲーム」です。
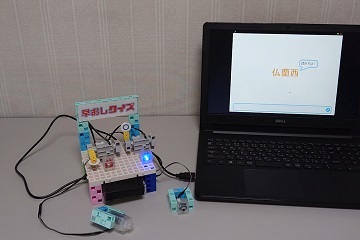 後半は、『早おしバトル』を製作しました。
後半は、『早おしバトル』を製作しました。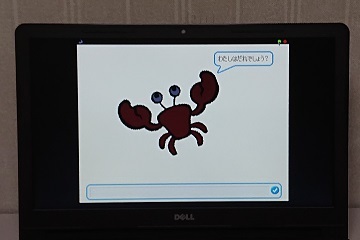 発展として、次の3つのクイズも紹介されています。
発展として、次の3つのクイズも紹介されています。 I11の『早おしバトル』で、サーボモーター2個が左右の札を上げるために使われています(写真上)。
I11の『早おしバトル』で、サーボモーター2個が左右の札を上げるために使われています(写真上)。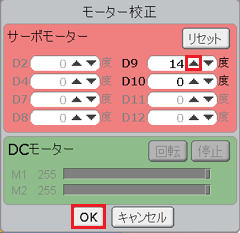 (1)左の札(D9)が右に比べて下がっていました。
(1)左の札(D9)が右に比べて下がっていました。
 (1) 『万里の長城』に見立てた箱の上に、羊(四角ブロック)を乗せる
(1) 『万里の長城』に見立てた箱の上に、羊(四角ブロック)を乗せる (2) 『ピラミッドの黄金の財宝』(左から、マスク・首飾り・スカラベ)を、石棺(箱のふた)の中に入れ、見ないで何が入っているか当てる。
(2) 『ピラミッドの黄金の財宝』(左から、マスク・首飾り・スカラベ)を、石棺(箱のふた)の中に入れ、見ないで何が入っているか当てる。 (3) 『ナスカの巨大地上絵』を、スタート地点からゴール地点まで走ってそうじします。
(3) 『ナスカの巨大地上絵』を、スタート地点からゴール地点まで走ってそうじします。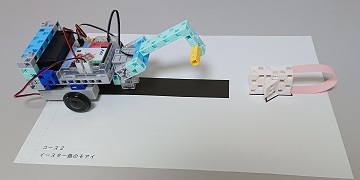 (4) 『イースター島のモアイ』を起き上がらせます。
(4) 『イースター島のモアイ』を起き上がらせます。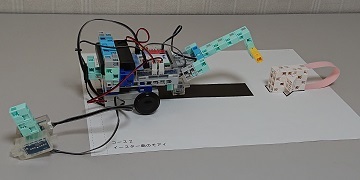 【使えるアイテム】+加速度センサー1個
【使えるアイテム】+加速度センサー1個