◆マスターコース(2年目)は、ディベロッパーコースでの経験をベースにした発展コースです。複数のセンサーやモーターを使い、自律型ロボット(人間が操作することなく自分自身で判断して行動するロボット)も製作します。
ロボットの動きを考えてフローチャートを作成し、プログラミングします。
| M1 | 踏切の製作 | 4月 |
| M2 | 機械式パーキングの製作 | 5月 |
| M3 | ライントレースカーの制御 | 6月 |
| M4 | トランスポーターカーの製作 | 7月 |
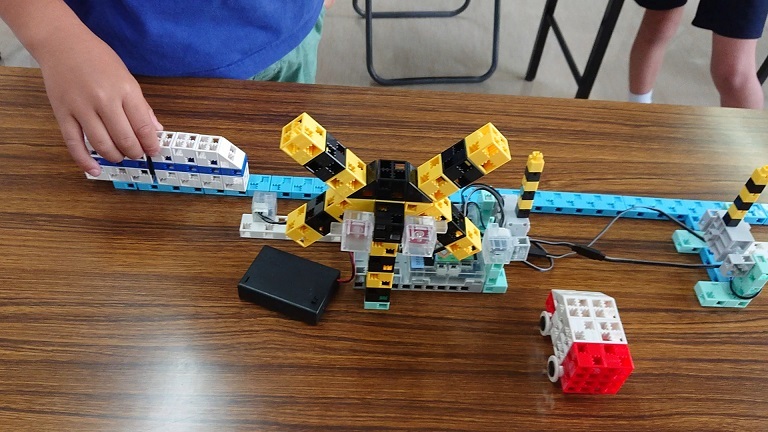
| M5 | 暗号受信機(光通信機)の製作 | 8月 |
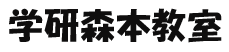
| M6 | 生物模倣(虫型ロボット) | 9月 |
| M7 | 車用衝突防止装置の製作 | 10月 |
| M8 | 自動追尾カーの製作 | 11月 |
| M9 | 二足歩行ロボ入門編 | 12月 |
| M10 | 水平維持天秤の製作 | 1月 |
| M11 | プロッターの製作 | 2月 |
| M12 | お掃除ロボットの開発 | 3月 |
 電車が近づくと、『踏切』の警報音が鳴り、遮断機(しゃだんき)が下りるようにプログラミングしました。電車が通過すると、遮断機が上がります。
電車が近づくと、『踏切』の警報音が鳴り、遮断機(しゃだんき)が下りるようにプログラミングしました。電車が通過すると、遮断機が上がります。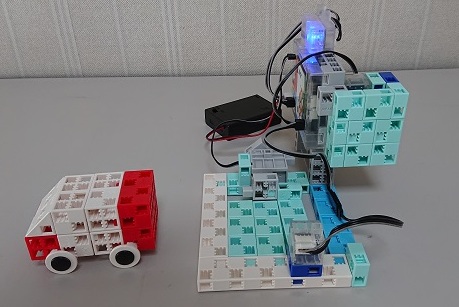 無人の『コインパーキング』です。
無人の『コインパーキング』です。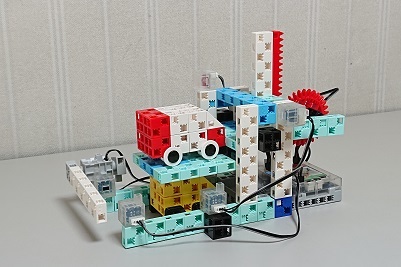 「ボタン0」を押し、入り口のバーを上下させます。
「ボタン0」を押し、入り口のバーを上下させます。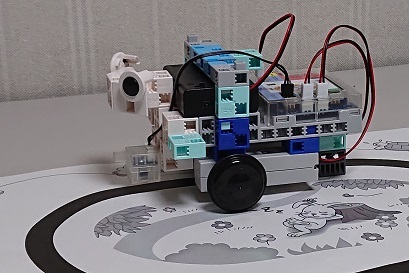 線(ライン)をなぞって(トレース)、自動で走る車です。
線(ライン)をなぞって(トレース)、自動で走る車です。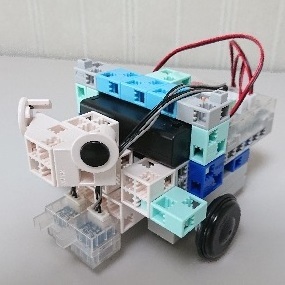 「センサー」(赤外線フォトリフレクター)を1個から2個に増やして、右回り・左回りの両方ができるように改良した「ライントレースカー」を製作しました。
「センサー」(赤外線フォトリフレクター)を1個から2個に増やして、右回り・左回りの両方ができるように改良した「ライントレースカー」を製作しました。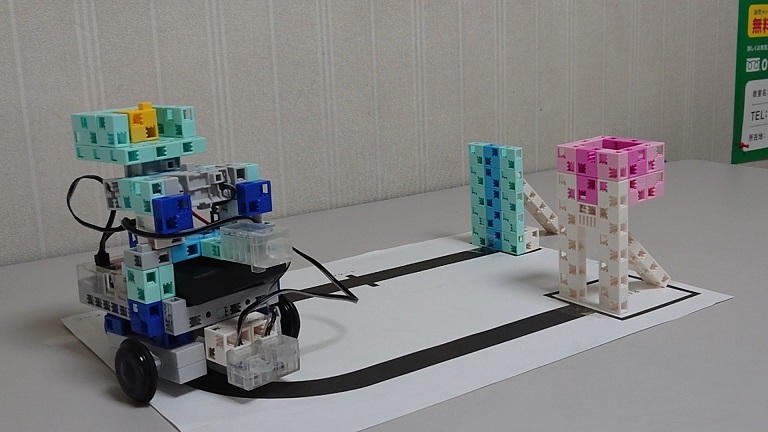 「ライントレースカー」を改良して、荷物運びをする『トランスポーターカー』を製作しました。
「ライントレースカー」を改良して、荷物運びをする『トランスポーターカー』を製作しました。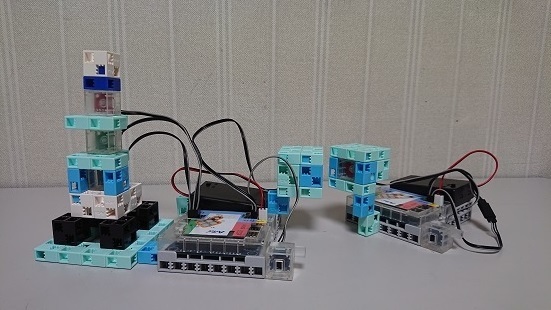 「送信機」(写真右)から4種類のボタンを押して送った信号を「受信機」(写真左)で受け取り、指示された色のLEDを点灯させます。
「送信機」(写真右)から4種類のボタンを押して送った信号を「受信機」(写真左)で受け取り、指示された色のLEDを点灯させます。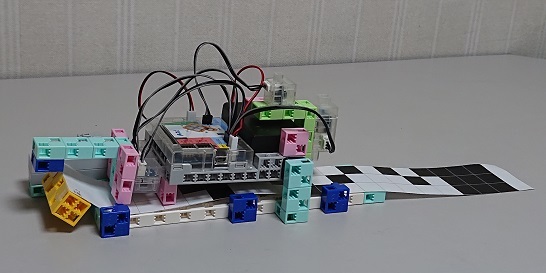 「バーコード・オルゴール」です。
「バーコード・オルゴール」です。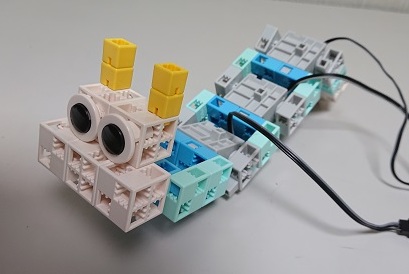 イモムシ型ロボットは、タイヤや脚(あし)がなくても進むロボットです。4種類の動きの中で前に進んだのはどれでしょうか。
イモムシ型ロボットは、タイヤや脚(あし)がなくても進むロボットです。4種類の動きの中で前に進んだのはどれでしょうか。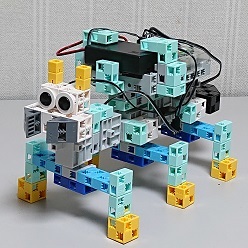 昆虫(こんちゅう)は、6本の脚で歩きます。
昆虫(こんちゅう)は、6本の脚で歩きます。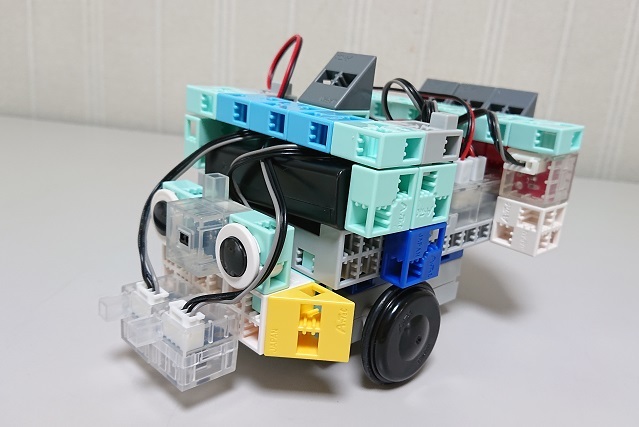 『衝突防止車』を製作し、次の動きをプログラミンしました。
『衝突防止車』を製作し、次の動きをプログラミンしました。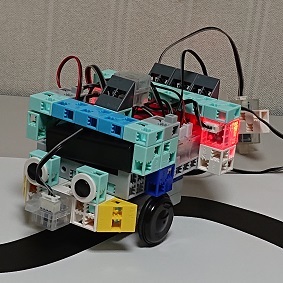 先月の『衝突防止車』のブロックを分解せず、センサー等を付け替えて『はみ出し防止車』を製作し、次の動きをプログラミンしました。
先月の『衝突防止車』のブロックを分解せず、センサー等を付け替えて『はみ出し防止車』を製作し、次の動きをプログラミンしました。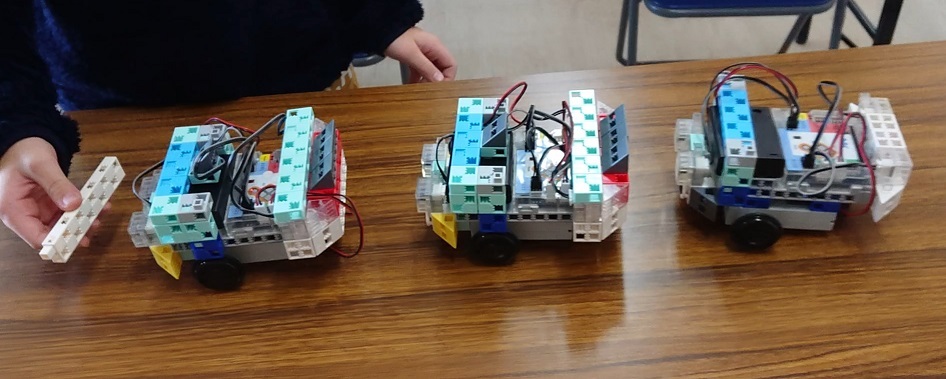 『ついていく車』は、前の車(または白いブロック)について進んだり、止まったり、後退したりします。(
『ついていく車』は、前の車(または白いブロック)について進んだり、止まったり、後退したりします。(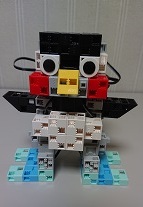 ペンギンの歩き方を、左右の足にサーボモータを各2個使って、プログラミングしました。
ペンギンの歩き方を、左右の足にサーボモータを各2個使って、プログラミングしました。 二足歩行ロボットをアレンジして、コミュニケーションロボットを製作しました。
二足歩行ロボットをアレンジして、コミュニケーションロボットを製作しました。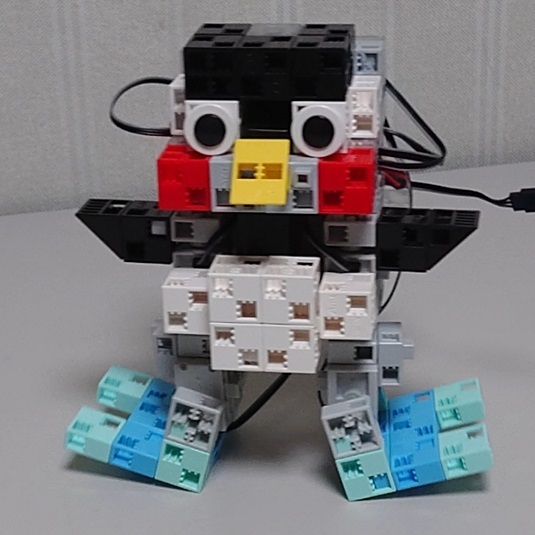 2.ダンシングロボ(写真下)・・・・足先を上げたり下ろしたりして、ノリノリに踊ります。(
2.ダンシングロボ(写真下)・・・・足先を上げたり下ろしたりして、ノリノリに踊ります。(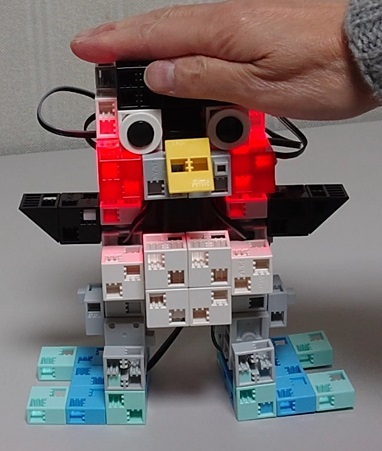 3.なかよしロボ・・「よしよし」と頭をなでると、照れてほっぺが赤くなります。(
3.なかよしロボ・・「よしよし」と頭をなでると、照れてほっぺが赤くなります。(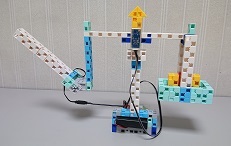 「バランスマシン(水平維持装置)の開発の前半は、『自動水平天びん』を製作しました。
「バランスマシン(水平維持装置)の開発の前半は、『自動水平天びん』を製作しました。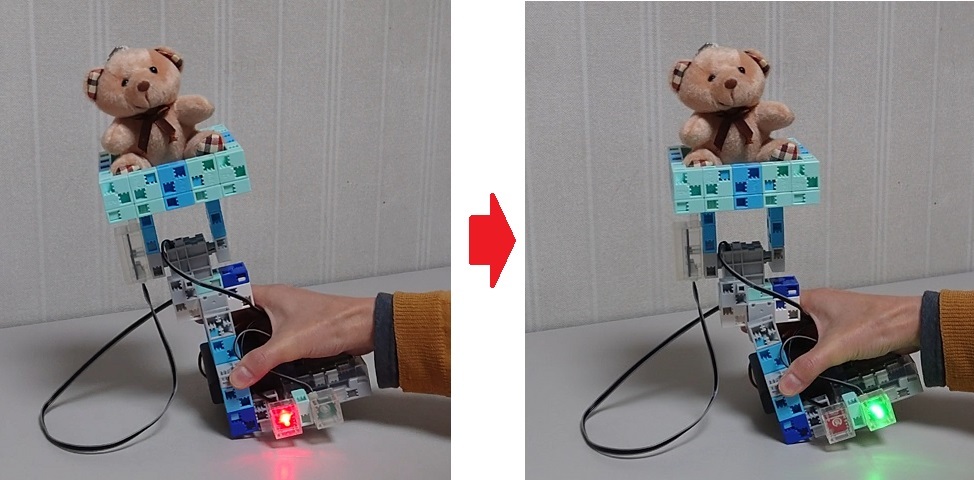 電車の乗り心地をよくするしくみにも使われている『自動水平維持マシン(テーブル)』を製作しました。
電車の乗り心地をよくするしくみにも使われている『自動水平維持マシン(テーブル)』を製作しました。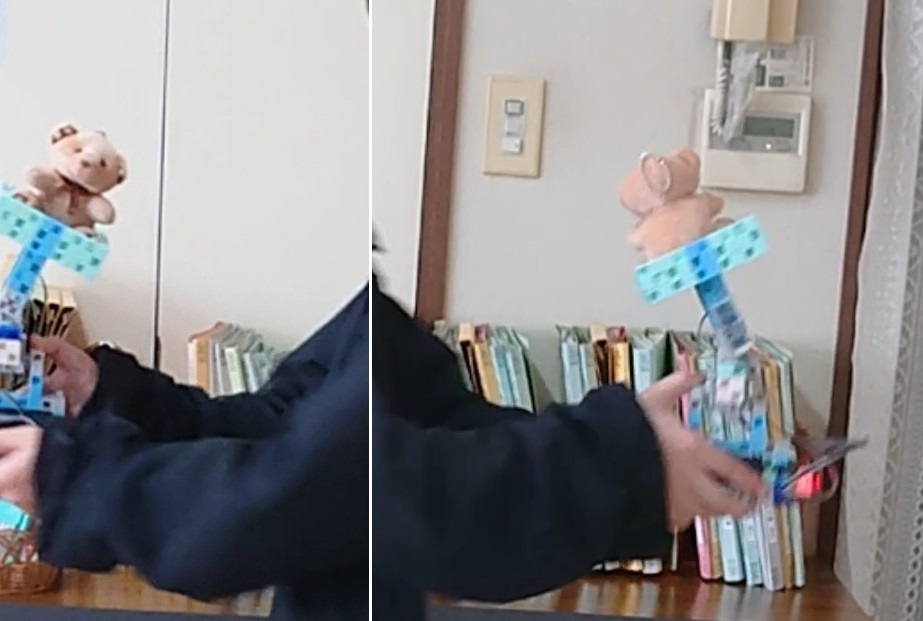 土台を手で持って、その場で回転してもらいました。遠心力(えんしんりょく)が働いていると、人形が乗っているテーブルが内側に傾いていることが分かります。
土台を手で持って、その場で回転してもらいました。遠心力(えんしんりょく)が働いていると、人形が乗っているテーブルが内側に傾いていることが分かります。
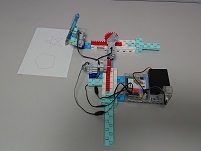 ボールペンを輪ゴムで取り付けて『プロッター』を製作しました。
ボールペンを輪ゴムで取り付けて『プロッター』を製作しました。 「ロボットそうじき」を製作しました。
「ロボットそうじき」を製作しました。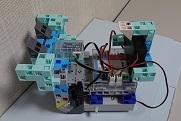 発展『かべを感知』を追加して製作しました。
発展『かべを感知』を追加して製作しました。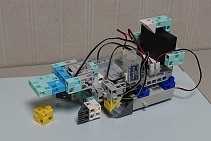 『ロボットそうじき』後半では、「ごみ集め」ができるようにしました。
『ロボットそうじき』後半では、「ごみ集め」ができるようにしました。